Days passed…
Stuck hard to my design
guidelines I was still away from even a tiny sketch of the device. I
was sure the direction but the horizon was covered by haze. I could
recognize the overall shape but unable to see in details. And the
devil is in the details.
Working with form is like sculpting in clay; early stages of process
give more freedom in reshaping but often it’s double-edge sword:
you end up a day devastated by endless versions of nothing. And
there’s no place for shortcuts. You can go on with refinement and
detailing ONLY after previous stage is done. Every missed step will
be only magnified by the next ones.

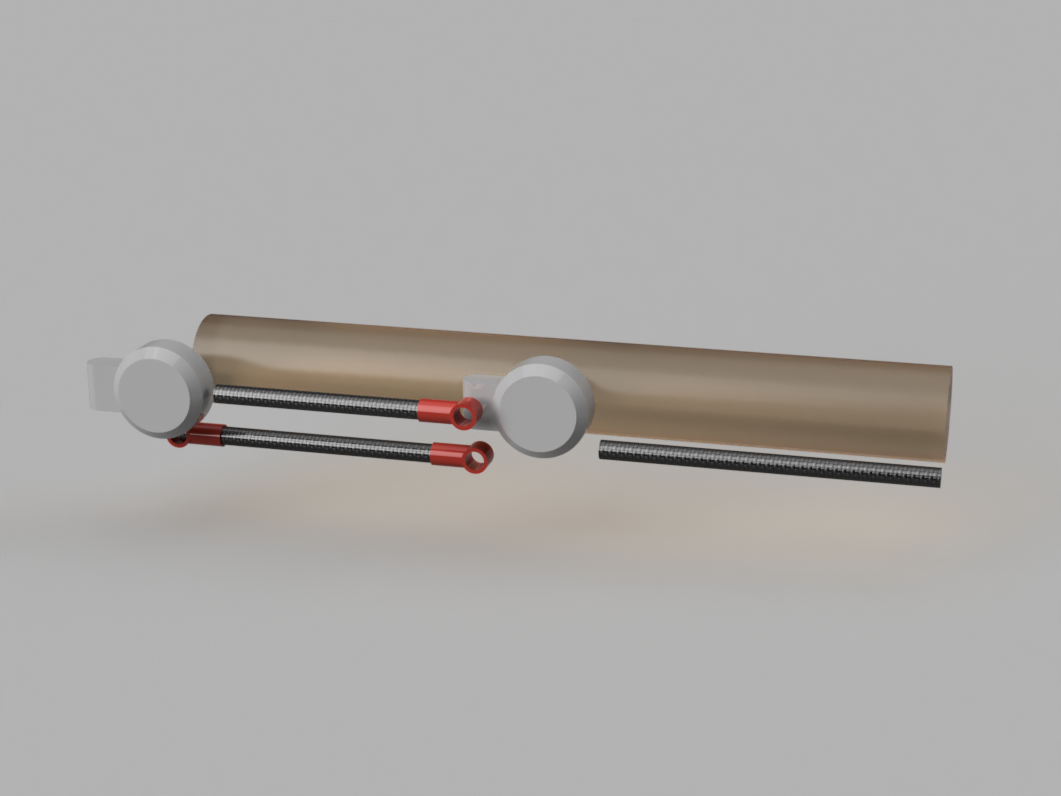
I experimented a little with double bar design
similar to Magic Arms, but being still unsatisfied I came up with the
idea of hiding whole positioning “drive train”. This is what I
like! The devices that are hard to figure out how they actually work!
I did one more design choice: to achieve 180 degrees of motion. Its
unnecessary in orthopedic applications but good thing in further
development. If nature is excessive so do I! Exoskeletons are one of
the purest examples of mimicking nature and it’s good thing to keep
in mind dealing with them.
Another thing I had to face up was indescribable lack of space. I
don’t consider myself as an artist but always try to do engineering
in arty way. I wanted slick design period. Fitting everything in 30mm
tubes and not very larger end connectors wasn’t an easy task and
required angelic patience and some evil spells.
Finally something started to emerge from nonentity mist. I was quite
happy with the shape it took.

{kind=link}
Comments
Post a Comment